歡迎光臨安科瑞電氣股份有限公司網(wǎng)站!
誠信促進發(fā)展,實力鑄就品牌
服務熱線:
18202170907
18202170907

 您的位置:網(wǎng)站首頁 > 技術文章 > 淺談掘進機電動機過載保護的算法優(yōu)化
您的位置:網(wǎng)站首頁 > 技術文章 > 淺談掘進機電動機過載保護的算法優(yōu)化 劉細鳳
安科瑞電氣股份有限公司 上海嘉定 201801
摘要:對于掘進機電動機的過載保護,宜采用反時限保護的思想,為在微機計算中實現(xiàn)該思想,引入電流—時間關系式,從而引入發(fā)熱常數(shù)K;然后根據(jù)少量已知的電動機過載保護要求,求得K值的保護限值;對K值進行累加計算,當K值超過限值時即發(fā)出電動機保護指令。現(xiàn)對優(yōu)化后的微機算法代碼進行舉例說明,該算法相較于傳統(tǒng)的分段式算法更為準確,特別是對于動態(tài)過載的情況,其效果尤為明顯。
關鍵詞:電動機;過載;微機;反時限;算法
0引言
對電動機的保護應將溫度保護和熱(電流)保護兩者結合,組成溫度—電流保護,這是一種比較理想的過負荷保護方式。目前,以微機為基礎的熱(電流)保護,以其處理數(shù)據(jù)靈活、適用范圍廣等特點,得到了越來越廣泛的應用。本文主要討論以微機為基礎的懸臂式掘進機的電動機熱(電流)保護算法。
1標準算法
礦用懸臂式掘進機電控系統(tǒng)執(zhí)行標準《懸臂式掘進機電氣控制設備》(MT/T971—2005),其中要求對掘進機電動機的過載短路保護應符合表1的規(guī)定。
表1
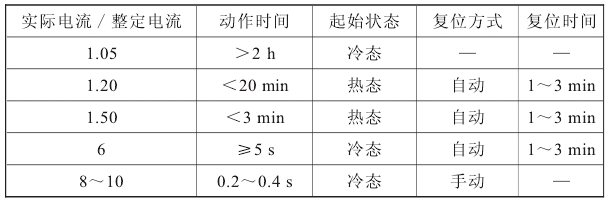
若按照表1所列數(shù)據(jù)執(zhí)行,對于1.20倍過載保護和1.50倍過載保護,在微機上的ST語言代碼表達如下:
IFCurrent_real>(Current_rated*1.20)THEN
Mid_120:=TRUE;
ELSE
Mid_120:=FALSE;
END_IF
TON_120(IN:=Mid_120,PT:=T#1200S);
IFTON_120.QTHEN
Overload_current_120:=TRUE;
END_IF(*1.2倍過載1200s*)
IFCurrent_real>(Current_rated*1.50)THEN
Mid_150:=TRUE;
ELSE
Mid_150:=FALSE;
END_IF
TON_150(IN:=Mid_150,PT:=T#180S);
IFTON_150.QTHEN
Overload_current_150:=TRUE;
END_IF(*1.5倍過載180s*)
IFOverload_current_120OROverload_current_150THEN
Motor_stop:=TRUE;
ELSE
Motor_stop:=FALSE;
END_IF(*過載后電動機停止*)
IFResetTHEN
Overload_current_120:=FALSE;
Overload_current_150:=FALSE;
END_IF(*復位*)
備注:Current_real—實時電流;Current_rated—額定電流(整定電流);Mid_120—1.2倍過載計算的中間變量;Overload_current_120—1.2倍過載;Motor_stop—電動機停止;Reset—復位。
對于表1所述及其在微機上的算法,有兩個問題:
(1)在1.5倍至6倍過載之間,數(shù)據(jù)缺失,沒有2倍、3倍、4倍、5倍等過載的動作時間。
(2)算法不夠合理。掘進機負載是一直變化的,電流也隨之變化,過載倍數(shù)也是一直變化的,那么過載保護的時間也應當是實時變化的,上文分段式算法無法準確反映動態(tài)過載的情況。
2算法優(yōu)化
對于電流頻繁變化的電動機宜采用反時限電流保護。采用反時限電流保護方法,首先要建立電流—時間的關系式。
電動機短時過負荷時,發(fā)熱時間短,發(fā)熱量大,電動機繞組在發(fā)熱時與鐵芯間存在熱絕緣,且鐵芯質量大而發(fā)熱緩慢,所以短時過負荷狀態(tài)的電動機的發(fā)熱狀態(tài)應由繞組發(fā)熱時間常數(shù)T′決定。
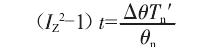
額定穩(wěn)態(tài)后的過載保護時間可用下式表示:

式中,t為額定穩(wěn)態(tài)后的過載保護時間(s);θn為額定穩(wěn)態(tài)溫升(℃);Δθ為超出θn的溫升(℃);Tn′為額定穩(wěn)態(tài)時的繞組發(fā)熱時間常數(shù)(s);IZ為電流倍數(shù),IZ=I/In。
變形得:
令:
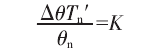
則過載電流倍數(shù)與保護時間的關系式為:
K=(IZ2-1)t
采用反時限過流保護算法時,繞組發(fā)熱時間常數(shù)T′一般應由電動機制造商提供,但國內(nèi)制造商一般都不提供此數(shù)據(jù),我們可以根據(jù)制造商提供的其他數(shù)據(jù)或相應標準來計算。
有多種方法可以計算K值大小,我們可以根據(jù)已知的電動機過載負荷能力對K值進行計算,根據(jù)表1數(shù)據(jù)計算K值:
1.2倍過載時:
K=(1.22-1)×1200=528
1.5倍過載時:
K=(1.52-1)×180=225
二者取小,則K=225。
由此我們可以反推2倍、3倍、4倍、5倍等其他倍數(shù)的過載保護時間,如3倍電流過載的保護時間則為:
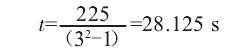
在變化過載電流條件下,為了在微機中實現(xiàn)電動機過載保護的計算,我們可以對K值進行累加計算,在微機上的ST語言代碼表達如下:
IFNum<5THEN
Num:=Num+1;
Current_real_sum:=Current_real_sum+Current_real;
END_IF
IFNum=5THEN
Current_real_average:=Current_real_sum/Num
(*計算5個數(shù)據(jù)采集周期內(nèi)的電流平均值,5可調*)Multiple_current:=(Current_real_average/Current_rated)
K1:=(Multiple_current*Multiple_current-1)*Num*Cycle;
K:=K+K1;
Num:=0;
Current_real_sum:=0;
END_IF(*計算K值*)
IFK>225THEN
Motor_stop:=TRUE;
END_IF
IFK<0THEN
K:=0
END_IF(*電動機停止*)
IFResetTHEN
Motor_stop:=FALSE;
END_IF(*復位*)
備注:Num—計數(shù),初始值為0;Current_real—實時電流;Current_real_sum—實時電流求和;Current_real_average—時間元內(nèi)的電流平均值;Multiple_current—電流倍數(shù);Current_rated—額定電流;Cycle—實時電流的采集周期;K1—K值計算的中間變量;K—過載K值累加值,初始值為0。
考慮到計算量的問題,所以引入了Current_real_average—時間元內(nèi)的電流平均值,如果微機計算能力允許的話,時間元應盡量取小,時間元越小則計算結果越真實準確,直接取數(shù)據(jù)采集周期Cycle的大小,此時Num取1。
3.安科瑞智能電動機保護器介紹
3.1產(chǎn)品介紹
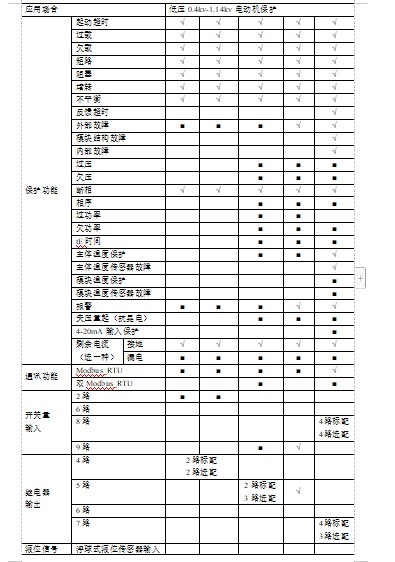
智能電動機保護器(以下簡稱保護器),采用單片機技術,具有抗干擾能力強、工作穩(wěn)定可靠、數(shù)字化、智能化、網(wǎng)絡化等特點。保護器能對電動機運行過程中出現(xiàn)的過載、斷相、不平衡、欠載、接地/漏電、堵轉、阻塞、外部故障等多種情況進行保護,并設有SOE故障事件記錄功能,方便現(xiàn)場維護人員查找故障原因。適用于煤礦、石化、冶煉、電力、以及民用建筑等領域。本保護器具有RS485遠程通訊接口,DC4-20mA模擬量輸出,方便與PLC、PC等控制機組成網(wǎng)絡系統(tǒng)。實現(xiàn)電動機運行的遠程監(jiān)控。
3.2技術參數(shù)
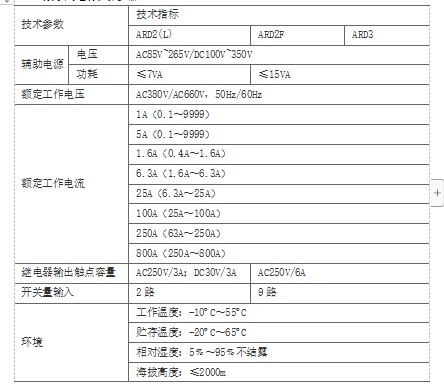
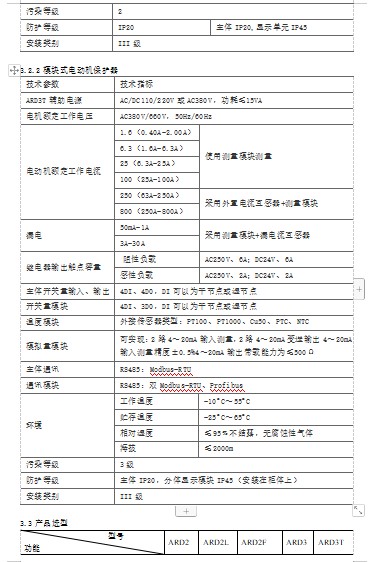
3.2.1數(shù)字式電動機保護器

4結束語
對于掘進機電動機的過載保護,宜采用反時限保護的思想。本文引入電流—時間關系式,對關系式中的K值進行累加計算,當K值超過限值時即發(fā)出電動機保護指令,從而將該控制思想融入到了微機上的實際算法中。該算法相較于傳統(tǒng)的分段式算法更為準確,特別是對于動態(tài)過載的情況,其效果尤為明顯。
參考文獻
[1] 鄭蔚,溫佶強,王寧.數(shù)字式電動機過熱保護的整定計算[J].浙江電力,2007,26(4):30-31.
[2] 朱軍帥,陳輝.掘進機電動機過載保護的算法優(yōu)化
[3] 安科瑞企業(yè)微電網(wǎng)設計與應用手冊.2020.06版
作者簡介:劉細鳳 ,女,安科瑞電氣股份有限公司,主要研究方向為智能電網(wǎng)供配電
消息") 在線交流
在線交流