劉細鳳
安科瑞電氣股份有限公司 上海嘉定 2018011
摘要:以往,在停車器控制系統(tǒng)中使用接觸器來控制執(zhí)行電機的正轉與反轉,由于接觸器有動作觸點,當觸點動作時會產生電火花,而且隨著觸點動作次數的增加,觸點接觸電阻會變大,導致電機供電缺相,容易造成堵轉,從而可能燒壞電機。本文介紹了使用大功率晶閘管進行電動機正反轉控制和相關的故障保護,應用ARM微控制器實現了晶閘管故障狀態(tài)的診斷,并分別實現了具有過載保護、斷相、三項不平衡等電機保護,并通過CAN總線將故障內容傳送至上位機。
關鍵詞:機電一體化;晶閘管;斷相;電機控制;保護措施
0引言
大功率反晶閘管具有無觸點、無火花、快速開關頻率等優(yōu)點,非常適合進行電動機正反轉控制。隨著自動化程度的提高,出現越來越復雜的過程控制,電機工作狀態(tài)不斷惡化。對電動機的保護提出了更高的要求,停車器控制系統(tǒng)就是比較典型的。結合晶閘管優(yōu)點和電機保護的需求,設計了一種一體化的電機保護電路。
1正反轉控制及電流檢測電路
電動機保護主電路采用了五路反并聯(lián)晶閘管,控制導通順序,從而實現電動機正、反轉。電流傳感器用來測量主回路工作電流,根據停車器的三相異步電機工作功率,選擇TA1402-02M互感器。在可控硅兩端引出接線端子檢測可控硅兩端電壓。
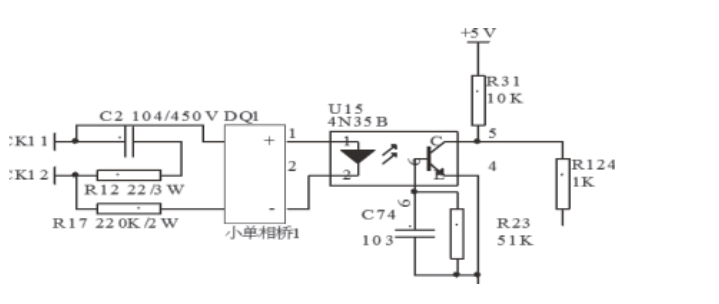
2晶閘管擊穿和晶閘管開路檢測電路
按照工作狀態(tài)將晶閘管障分成兩種,分別是晶閘管路和晶閘管擊穿,電機在不啟動的情況下檢測晶閘管擊穿,電機在開啟時以及運行狀態(tài)下檢測晶閘管開路。如果發(fā)現故障,對于故障狀態(tài)分別設置對應的標記,并及時關斷晶閘管。晶閘管擊穿檢測是在電機正轉或反轉啟動信號發(fā)出后延時50ms,然后進行晶閘管狀態(tài)檢測。如圖1所示,采集晶閘管兩端的電壓,檢測晶閘管的導通狀態(tài),根據五路反并聯(lián)晶閘管導通狀態(tài)和實際狀態(tài)的異同,可判斷是擊穿還是開路。
圖1 擊穿和開路檢測電路
3斷相和三項不平衡保護
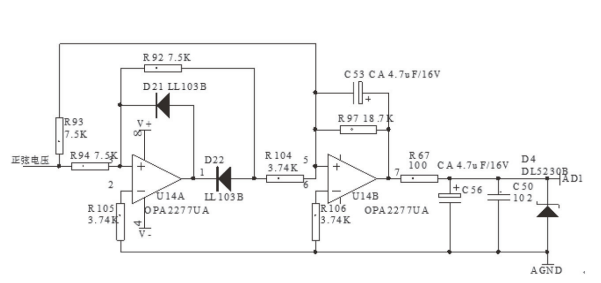
在控制程序中斷相檢測以低于額定電流的1/8為電流斷相依據,停車器電機額定功率為750W,額定工作電流為1.5A左右,斷相檢測在啟動信號發(fā)出50ms后開始檢測,目的是跳過接觸器的動作延時。但是在啟動電流很大的時間內還是要進行斷相檢測,在出現具有斷相故障標志信號開始后2s內檢測到的有效斷相故障信號的次數大于總的檢測次數的75%,那么認為斷相,發(fā)出斷相故障信號。三相不平衡檢測過程中,找到主回路三相電流的大值和小值,如果大值大于小值的兩倍那么就認為三相不平衡發(fā)生。在發(fā)現具有三相不平衡信號開始后5s時間范圍內檢測到有效三相不平衡的故障信號次數大于總的檢測次數的75%,就認為是三相不平衡發(fā)生。電路圖2采集主電路中電流互感器輸出的電流經電阻轉換成的正弦電壓信號進行處理,經CPU 進行AD采樣后獲取主電路電流大小。
圖2 電流采集電路
4反時限過電流保護
反時限保護特性是故障電流(或稱短路電流)越大,接觸器保護的動作延時越小,更接近電機出現故障時的特性,用反時限進行過電流保護更有優(yōu)勢。國外廣泛使用反時限進行過電流保護,并較早建立了數學模型。
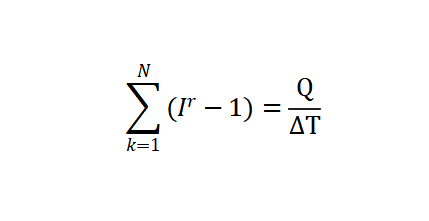
(1)式中:I——過電流倍數,以額定電流為基準; r——是常數,取值在范圍有三種[1] ,針對電機保護,采用r = 2; Q——常數[2],量綱為時間,s; T——出現過電流保護時間,s。使用該模型可以有效進行反時限過電流保護計算,但是由于電機運行中的電流不斷變化,不是嚴格的反時限關系,直接使用該模型,計算結構不夠準確,將該模型演變?yōu)榉e分方式更適合實際情況,演變后公式為:
(2)式中:Ik——是第K次采樣時的過電流倍數; ΔT——采樣周期,s; N——累計次數; Q——由用戶確定的時間常[3],s。
5軟件設計
軟件采用多任務設計方法,任務分為:外設參數采集、電流采集、電壓采集、電機正反轉輸入檢測、故障類型判斷、狀態(tài)指示。
(1)外設參數采集包括:停車器電動機功率設置、啟動時間設置、零位檢測。
(2)電流采集:通過NXP ARM處理器內部自帶AD(12位)轉換器采集由電流互感器輸出的主電路電流信號,每路電流信號采集10次,采用中值濾波法,濾波效果良好。
(3)電壓采集:采集可控硅兩端的電壓,采用統(tǒng)計4N35B光耦輸出的高電平時間確定電壓是否存在。
(4)電機正反轉輸入檢測:使用軟件濾波采集正轉反轉控制信號,進行按鍵的互鎖處理,只有在一個按鍵在松開狀態(tài),另一個按鍵的輸入才有效。按鍵釋放50m后才開始檢測下一次按鍵信號。
(5)故障類型判斷: 故障類型包括三相不平衡、晶閘管擊穿、晶閘管開路、反時限過載、斷相。通過輸入信號按照故障判別原理進行多種故障分析。
(6)狀態(tài)指示:通過指示燈顯示設備運行狀態(tài),如果出現故障,相應的故障指示燈會點亮。
6安科瑞ARD系列智能電動機保護器介紹與綜合選型
6.1產品簡介
ARD該系列低壓電動機保護器,具有過載、斷相、不平衡、欠載、接地/漏電、堵轉等保護功能。可與接觸器、電動機起動器等電器元件構成電動機控制保護單元,具有遠程自動控制、現場直接控制、面板指示、信號報警、現場總線通信等功能。應用范圍:可廣泛應用于煤礦、石化、冶煉、電力、建筑等行業(yè)的配電領域。
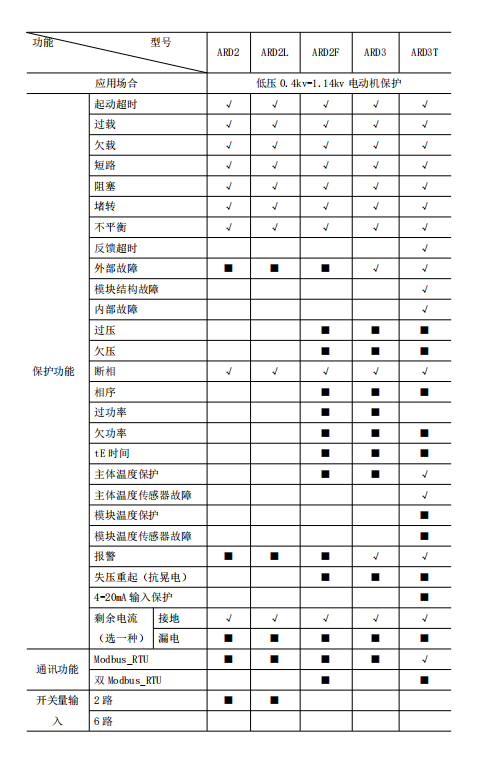
6.2產品選型
產品功能
說明:“√"表示具備“■"表示可選
7結束語
停車器保護控制器具有結構緊湊,保護功能完善,設計上使用反并聯(lián)可控硅進行電機正反轉控制等特點,ARM處理器主要采集可控硅的電壓和電流信號從而實現電機的保護,經過實際運行檢測,停車器電機保護控制器運行穩(wěn)定可靠,各項指標符合設計規(guī)定。
【參考文獻】
[1]周小麗,陳剛.反時限過流保護在微機保護裝置中的實現[J].江蘇電機工程,2003(9).
[2]黃猛.可控硅交流接觸器柜在三輥熱軋機上的應用[J].特鋼技術,2010(4).
[3]隋國強,董長寶.三相異步電動機保護電路在停車器控制系統(tǒng)中的應用[J].哈爾濱鐵道科技,2020(04).
[4]安科瑞企業(yè)微電網設計與應用手冊.2020.06版.
作者簡介:
劉細鳳,女,本科安科瑞電氣股份有限公司,主要研究方向為電動機保護器的設計與應用




 您的位置:
您的位置:消息") 在線交流
在線交流